
Bicycles are marvels of engineering—simple in design yet complex in behavior. Anyone who has ridden a bike knows it stays upright while moving but collapses the moment it stops. This common observation raises a fundamental question: why can’t bicycles stand up by themselves? The answer lies at the intersection of physics, mechanics, and human input. Unlike motorcycles with kickstands or four-wheeled vehicles with inherent stability, bicycles rely on motion and rider control to remain balanced. Understanding this phenomenon requires exploring principles like gyroscopic forces, trail geometry, center of mass, and dynamic equilibrium.
The Physics of Balance: Static vs. Dynamic Stability
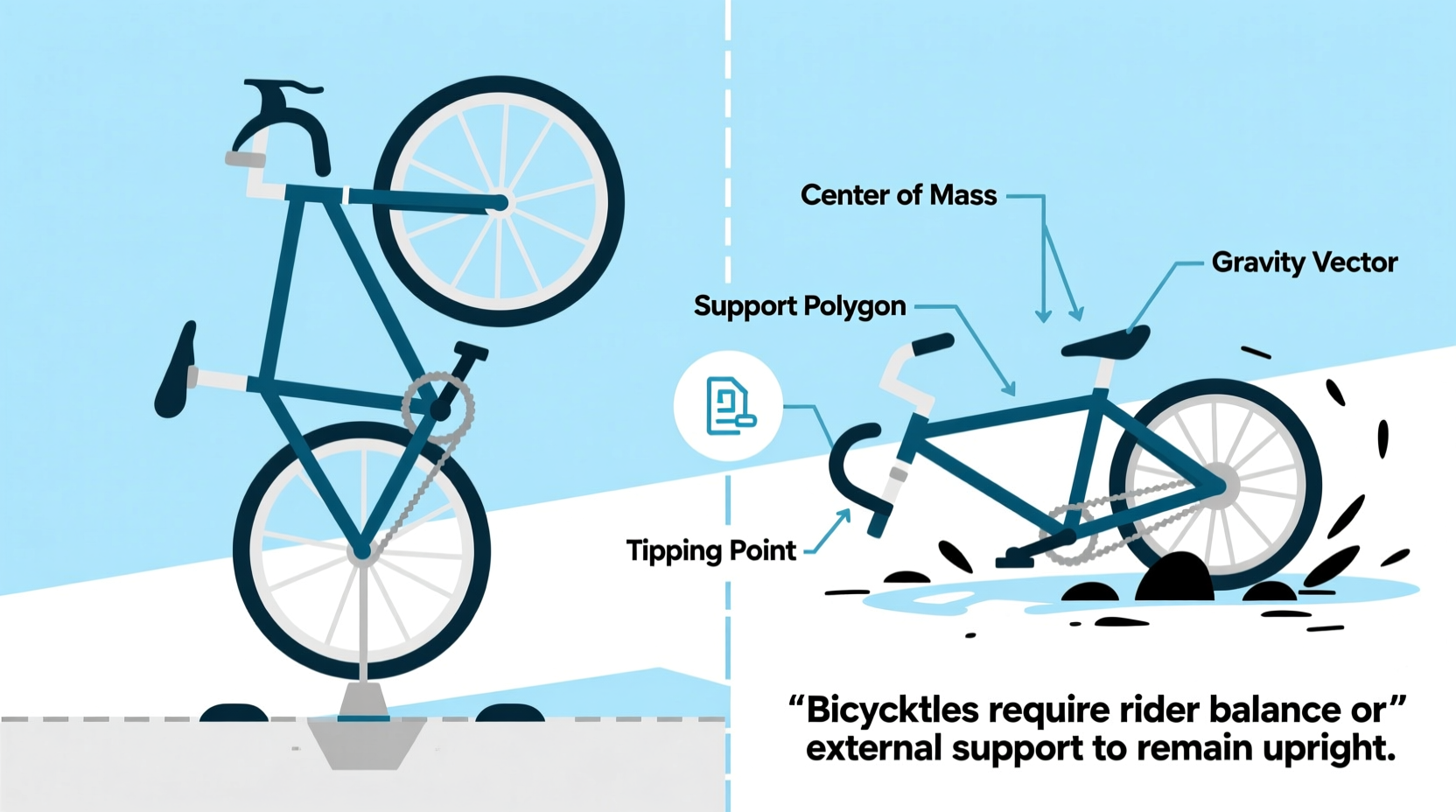
A stationary bicycle is statically unstable. It has two narrow wheels aligned in a straight line, offering minimal support base. When upright and motionless, the bike’s center of mass is balanced directly over the contact points of the tires. But even the slightest disturbance—a breeze, uneven ground, or a small shift in weight—disrupts this delicate balance, causing the bike to tip over.
In contrast, when a bicycle moves forward, it gains dynamic stability. Motion introduces forces that help correct imbalances automatically. These include:
- Gyroscopic effect: The spinning wheels act like gyroscopes, resisting changes in orientation.
- Trail and steering geometry: The front fork is angled so the contact point trails behind the steering axis, creating self-correcting steering.
- Rider input: Humans constantly make micro-adjustments to handlebars and body position to maintain balance.
Together, these elements allow a moving bicycle to stay upright, even without active rider correction in some cases. However, remove the motion, and the stabilizing forces vanish, leaving the bike vulnerable to tipping.
Gyroscopic Forces and Wheel Spin
One of the most commonly cited reasons bicycles stay upright while moving is the gyroscopic effect of the wheels. A spinning wheel resists changes to its plane of rotation due to angular momentum. When a bike begins to lean, the gyroscopic force from the front wheel induces a steering response that turns the wheel into the direction of the fall, helping to bring the bike back under the rider.
However, research has challenged the dominance of this theory. In a landmark 2011 study published in *Science*, engineers built a bicycle with counter-rotating wheels designed to cancel out gyroscopic effects. Surprisingly, the bike still remained stable when moving, proving that gyroscopic forces alone aren’t responsible for balance.
“While gyroscopic effects contribute to stability, they are not necessary for a bicycle to balance itself.” — Dr. Andy Ruina, Mechanical Engineering Professor, Cornell University
This finding shifted the focus toward other design elements, particularly the geometry of the front fork and the concept of “trail.”
The Role of Trail and Steering Geometry
Trail refers to the distance between the point where the front wheel touches the ground and the point where the steering axis (the imaginary line through the head tube) would intersect the ground. Positive trail means the contact point trails behind the steering axis—a key feature in bicycle design.
When a bike starts to lean, the trail causes the front wheel to automatically steer into the direction of the lean. This action shifts the wheels back under the center of mass, correcting the imbalance. Think of how a shopping cart’s front wheels swivel to follow motion—the same principle applies, albeit more precisely engineered.
Manufacturers fine-tune trail based on intended use:
| Bike Type | Average Trail (mm) | Stability Characteristic |
|---|---|---|
| Road Bike | 50–60 | Responsive, quick steering |
| Mountain Bike | 60–70 | Stable at high speeds, rugged terrain |
| Cruiser Bike | 70–90 | Very stable, slow-speed handling |
| Race Bike | 45–55 | Less stable, highly maneuverable |
Too much trail makes steering sluggish; too little makes the bike twitchy and hard to control. The right balance allows for self-stabilizing behavior during motion.
Human Input and Active Control
Even the most well-designed bicycle cannot balance indefinitely without input. Riders constantly make tiny corrections—shifting body weight, adjusting handlebar angle, pedaling rhythmically—all contributing to equilibrium. This active control system works in tandem with passive mechanical stability.
Experienced riders often don’t realize how much subconscious correction they perform. For example, when riding “no hands,” the rider uses subtle torso movements to influence the bike’s direction and balance. This is only possible because the bike’s design allows small shifts in center of mass to produce corrective steering via trail and inertia.
Novice riders struggle because they overcorrect—turning the handlebars too sharply in response to a lean, which causes an opposite lean and leads to wobbling. With practice, the nervous system learns to modulate these inputs smoothly.
Mini Case Study: Learning to Ride Without Training Wheels
Six-year-old Maya had been practicing on her bike for weeks with training wheels. Her parents removed them one Saturday morning. At first, she wobbled and fell within seconds. But after five attempts, something clicked. She managed to pedal 20 meters in a straight line before gently tipping over. By the end of the day, she was circling the driveway confidently.
What changed? Not the bike’s physics—but her ability to anticipate and correct imbalance. Her brain began processing sensory feedback—visual cues, inner ear signals, and handlebar pressure—and responding with precise muscle movements. This neuromuscular adaptation is central to bicycle balance.
Why Kickstands Are Necessary
Given that bicycles can’t balance when still, external aids like kickstands are essential for parking. A kickstand extends the support base, shifting the center of gravity over a wider footprint. Even leaning a bike against a wall or tree serves the same purpose—adding lateral support.
Some modern designs attempt to address this limitation:
- Self-standing prototypes: Experimental bikes with retractable legs or widened rear tracks.
- Center stands: Common on utility and cargo bikes, these provide two-point ground contact.
- Smart balancing systems: Electric bikes with gyro-stabilizers are in early development but remain niche.
Yet, for now, the traditional bicycle remains dependent on motion or external support to avoid tipping.
Step-by-Step: How a Bicycle Balances Itself While Moving
- Motion begins: As the bike moves forward, wheels generate angular momentum.
- Lean occurs: Due to wind, uneven terrain, or rider shift, the bike starts to tilt to one side.
- Front wheel steers: Trail geometry causes the front fork to turn into the direction of the lean.
- Path curves: The bike follows a curved path, bringing the wheels back under the center of mass.
- Correction achieved: The bike straightens, and balance is restored—often without rider intervention.
- Ongoing adjustment: Small oscillations continue, corrected by rider input or passive dynamics.
This cycle repeats continuously while riding, creating the illusion of effortless balance.
Frequently Asked Questions
Can a bicycle balance itself without a rider?
Yes, under certain conditions. A properly designed bike pushed at sufficient speed can travel in a straight line or recover from small disturbances due to trail and mass distribution. However, it will eventually wobble and fall as instability accumulates.
Do heavier bikes balance better?
Not necessarily. While greater mass increases inertia (resistance to change), it also demands more effort to correct. Stability depends more on geometry and speed than weight alone.
Why do bikes fall over when parked on a hill?
On a slope, gravity pulls the bike downhill. If the front wheel isn’t aligned with the incline, torque rotates the frame, causing it to tip. Even with a kickstand, inadequate traction or improper positioning can lead to collapse.
Checklist: Ensuring Your Bike Stays Upright When Parked
- ✅ Use a kickstand or secure the bike to a rack.
- ✅ Engage both brakes to prevent rolling.
- ✅ Choose level ground whenever possible.
- ✅ Position the bike so the kickstand rests on firm, non-slippery surfaces.
- ✅ Avoid parking in high-wind areas or crowded spaces where bumps are likely.
Conclusion
The inability of bicycles to stand up by themselves isn’t a flaw—it’s a consequence of their elegant, motion-dependent design. From gyroscopic effects to trail geometry and human control, multiple factors converge to create stability only when the bike is in motion. When stopped, the absence of these dynamic forces leaves the bicycle vulnerable to gravity’s pull. Understanding this interplay deepens appreciation for the engineering behind everyday cycling and informs smarter choices in riding, parking, and bike selection.








 浙公网安备
33010002000092号
浙公网安备
33010002000092号 浙B2-20120091-4
浙B2-20120091-4
Comments
No comments yet. Why don't you start the discussion?