All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier

Customization:

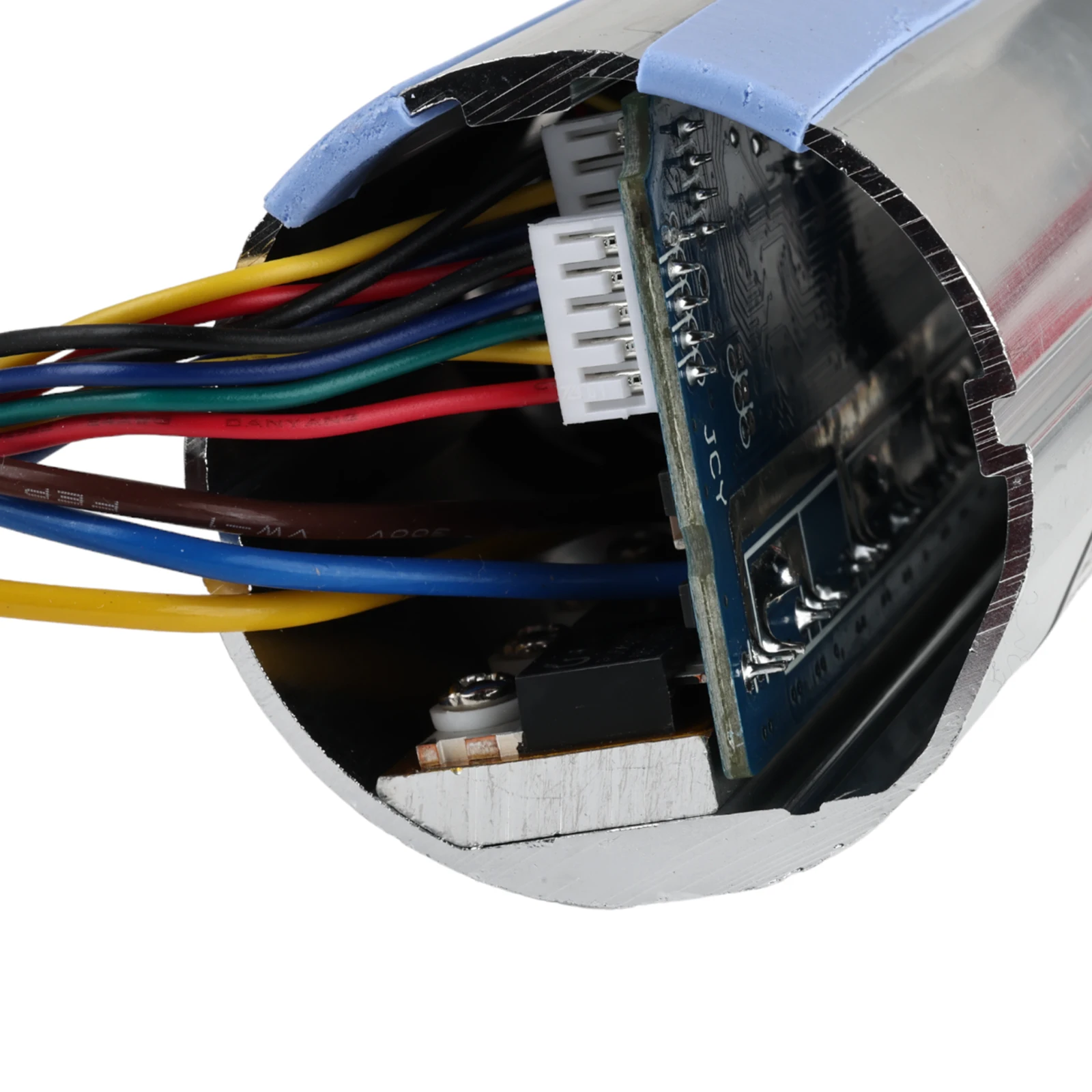
The Controller Motherboard for Segway ES1/ES2 Ninebot Electric Scooter is a durable, OEM-compatible accessory designed for seamless integration into electric scooters. With a compact aluminum body and insulated copper wiring, it ensures efficient heat dissipation and reliable performance in demanding environments. Its modular design supports easy installation and customization for diverse applications.
| Feature | Specification | Application Scenario |
|---|---|---|
| Material | Aluminum body, insulated copper wiring | Electric scooters, outdoor use |
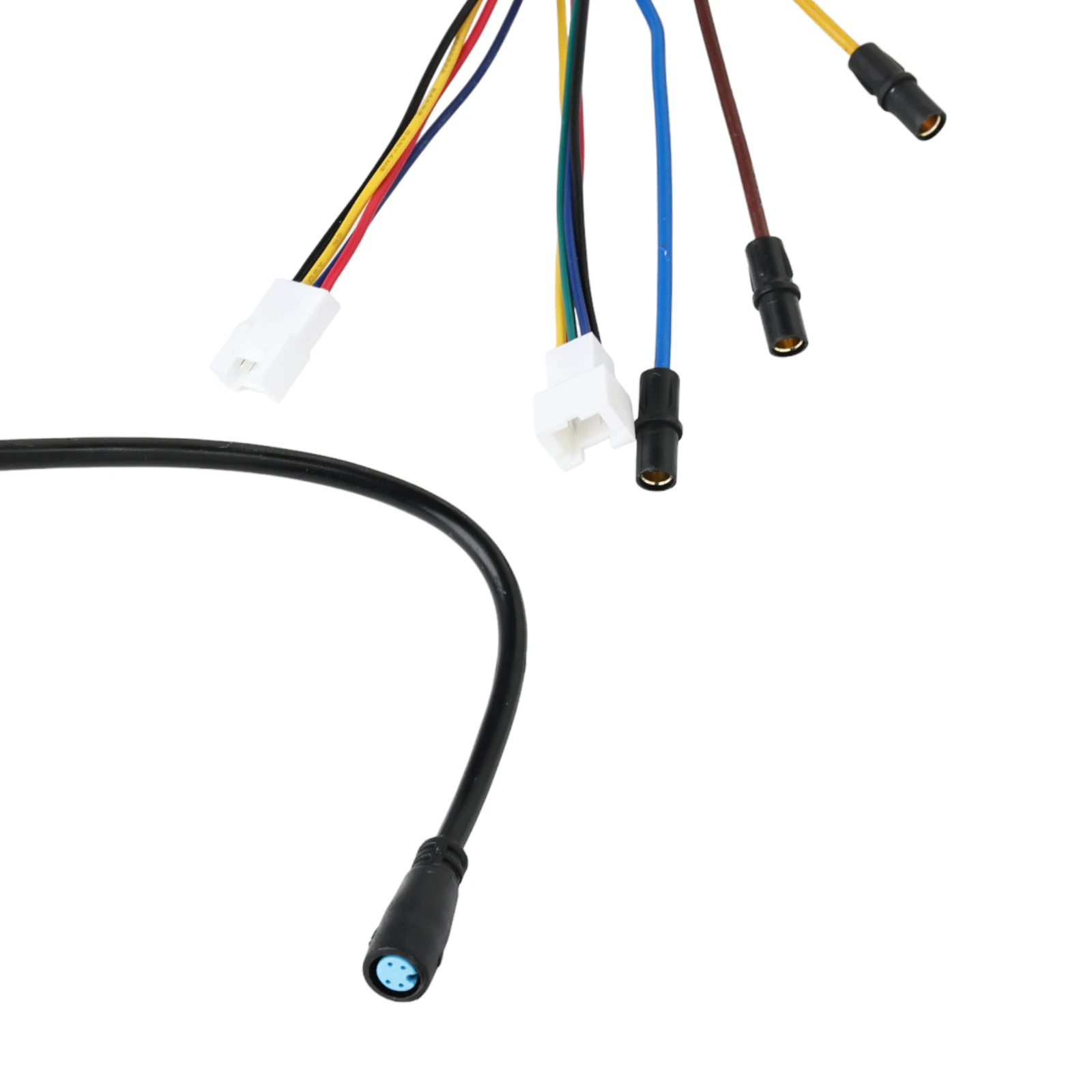
| Connectors | 6-pin + multiple standard connectors | Custom integration for voltage/current |
| Heat Dissipation | Metallic design with fins | Prevent overheating during high-speed use |
| Safety | Overheat protection, insulated wiring | Safe operation in varied environments |
| Compact Design | Reduced footprint | Space-constrained vehicles |
Adjust connector configurations or wiring layouts to meet specific voltage/current requirements for customized electric vehicle setups.
Ideal for Segway ES1/ES2 users seeking a reliable controller that balances power, safety, and adaptability. Its modular design allows seamless upgrades while maintaining system stability.
| Parameter | Base Model | Advanced Model | Pro Model |
|---|---|---|---|
| Voltage Support | 36V | 48V | 60V |
| Heat Dissipation | Standard fins | Enhanced fins (+20%) | Active cooling (+40%)* |
| Connector Types | 6-pin base | +3-pin expansion | Full modular system |
Technical Breakthroughs:
Version Selection Guide:
With the Pro’s active cooling system, you can sustain high-speed rides in extreme temperatures. Pair its modular connectors with custom voltage setups to maximize system efficiency.

The Product Description is generated by third-party, and Alibaba.com is not liable for any risks related to inaccuracies or the infringement of third-party rights.
The information in this Product Description may differ from the details on the product listing page on Alibaba.com. Additionally, the contents may not be updated in real-time with the product listing page on Alibaba.com, and there may be delays in reflecting the most updated information. The description on product listing page takes precedence. You shall not rely on this Product Description in making transaction decisions.
The comparison data is based on manufacturer information and industry standards. Actual results may vary depending on individual use cases. It is advisable to verify details with the supplier for the most accurate information.