All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
Electric motor arduino
(999+ products available)
2025-12-02
Alibaba
Power Transmission
Motors
DC Motors
Previous slide
Next slide
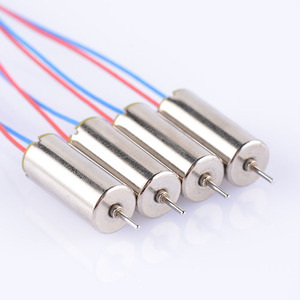
High Speed 8520 60000rpm
Motor
arduino
Drone Drone
Motor
$0.65-0.90
Min. order: 100 pieces
Previous slide
Next slide
250w 500w 1000W Waterproof 24v 36v 48v
Electric
Brushed Dc Torque
Motor
30nm
$50-66
Min. order: 50 pieces
Previous slide
Next slide
10 RPM DC Gear
Motor
12V/24V 520 33mm
Electric
Motor
Gear
Motor
$2.92-3.37
$3.25-3.75
-10%
Min. order: 100 pieces
Previous slide
Next slide
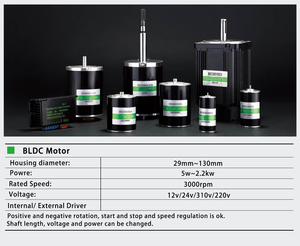
Custom Low Noise Bldc
Motor
15w/30w/100w/300w/500w/1kw/2kw 12v/24v/36v/48v/72v/220v/310v
Electric
Brushless Dc
Motor
$10.60-28.80
Min. order: 1 set
Previous slide
Next slide
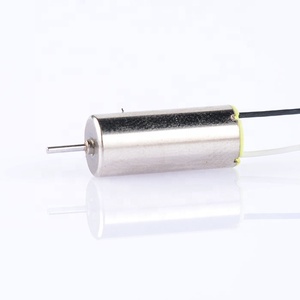
High Quality
Electric
Motors
with Planetary Gears Brushless
Motor
for Drone 12v 24v
$9.50-12.50
Min. order: 100 pieces
Previous slide
Next slide
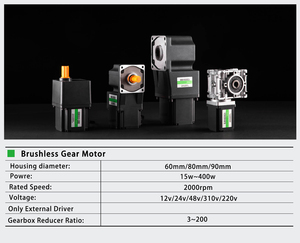
GMP36-TEC3650 36mm Brushless
Motor
Dc 24v
Electric
$11.80-17.80
Min. order: 100 pieces
Previous slide
Next slide
ACEBOTT STEM Kids Beginner Kit Exoskeleton Sensing Remote Control Robot Smart Car ESP32 for
Arduino
DIY with Glove Programming
$15-76.69
Min. order: 1 piece
Previous slide
Next slide
KUONGSHUN OEM ODM Stem Education HD Camera Robot Car Kit Coding DIY WIFI With Battery High School Robotics Stem Kits for
Arduino
$127.57-128.43
Min. order: 1 piece
1
2
3
4
5
More pages
27
Top categories
Bearing Accessories
Motors
Bearings
Hydraulic Parts
Power Transmission Parts
Speed Reducers
Gearboxes
Industrial Brakes
Previous slide
Next slide
Related Searches:
12v motor arduino
dc gear motor arduino
arduino with stepper motor
arduino with motor
control 12v motor arduino
dc motor to arduino
arduino 12v motor
step motor 28byj 48 arduino
step motor arduino
dc motor arduino
vibration motor arduino
bldc motor controller arduino
arduino pwm motor speed control
motor drive arduino
dc motor and arduino