Types of robot hexapod kits
Robot hexapod kits come in diverse varieties, each tailored to meet specific requirements and applications. Here are some of their types:
-
Walking Hexapod
This hexapod moves like insects by walking on its six legs. Each leg has joints controlled by servos to lift, extend, and bend. Its sturdy build lets it cross rough terrains without falling. Its body holds the battery and brain (the main control board), sending out commands to the legs through the servos. A walking hexapod is a good kit to buy if one wants to learn about robotics.
-
Spider Hexapod
This six-legged robot is like a spider; it has a big body and long legs. The legs have joints that allow them to move up and down, side to side, and twist. The body holds the battery and brain, with weight distributed evenly to avoid tipping over. Its legs can extend far to walk over rough surfaces like rocks or dirt. A spider hexapod is one of the many hexapod robot kits that can easily walk on rough surfaces.
-
RoboBee Hexapod
This small robot has six legs and can fly and walk like a bee. Its light body lets it float in the air, and its legs can move fast to walk on different surfaces. Inside are tiny motors that make the legs move and a battery that powers them. A RoboBee hexapod is suitable for those who want to learn how to make one that can walk and fly.
-
Multi-Purpose Hexapod
This robot can do many tasks, so it is called a multi-purpose hexapod. It has six legs like a bug and can walk on different surfaces. Its body is strong enough to carry tools to help it work. It has sensors that help it see and feel things around it. A multi-purpose hexapod is a good choice if one wants to learn how to make a robot that can do many things.
-
Articulated Arm Hexapod
This one combines six legs and an arm that can bend and reach like a human arm. Its legs help it walk, while its arm can grab and move things. Inside are motors that make its legs and arm move, and a battery that powers them. Its body is strong enough to support the tools it will carry. An articulated arm hexapod is excellent for those who wish to create one that can walk and work.
Design of robot hexapod kit
Hexapod robots are built in different designs depending on the intended applications. Here are some common design elements.
- Body Frame: The body frame is designed to be lightweight yet strong. It carries the load of all the other components. Some common materials used include aluminum, carbon fiber, and plastics. The frame can take different shapes. For instance, it can be rectangular, oval, or custom shapes. The choice of the frame shape depends on the robot's purpose. A rectangular frame provides more stability. An oval shape is more aerodynamic. The frame can also be modular. This makes it easy to adapt to different tasks.
- Legs and Joints: The legs are often made of lightweight materials like aluminum or carbon fiber. Each leg has 3 to 4 joints, which use servos or motors to move. The joints typically employ rotational or prismatic movements. Each joint's range of motion is critical for the robot's flexibility. The legs can be arranged in a symmetrical or staggered pattern. A symmetrical pattern offers balanced movement in all directions. A staggered layout can enhance agility.
- Control System: The control system is the brain of the hexapod. It coordinates the movements of each leg and joint. The system uses a microcontroller or a small computer. It runs algorithms that mimic animal locomotion. Feedback from sensors helps it adjust movements in real time. The control system can be centralized or distributed. A centralized system uses one main unit to control everything. A distributed system has separate units for each leg. The Control System can also use wireless or wired communication. Wireless systems offer more mobility. Wired systems can be more reliable.
- Power Supply: The power supply is critical for the hexapod's operation. It can use batteries, fuel cells, or a combination of both. Lithium-ion and lithium-polymer batteries are popular choices. They offer a good balance of weight and energy. The power supply design must ensure efficient energy use. It should distribute power evenly to all components. Fuel cells can provide longer operation times. They can be refueled quickly compared to batteries. The power supply can also include solar panels for extended missions.
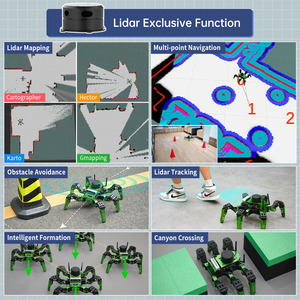
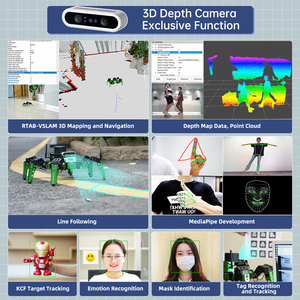
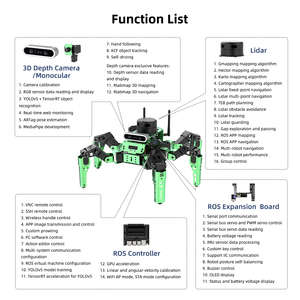
- Sensors and Feedback Mechanisms: Sensors play a vital role in a hexapod's performance. They provide data about the environment and the robot's position. Common sensors include cameras, LIDAR, ultrasonic sensors, and IR sensors. Feedback mechanisms help the robot adapt to changes. They may use encoders at joints to track positions. Pressure sensors in the feet can detect ground contact. IMUs help maintain balance. The robot can then adjust its movements based on this feedback. This ensures stable and accurate navigation.
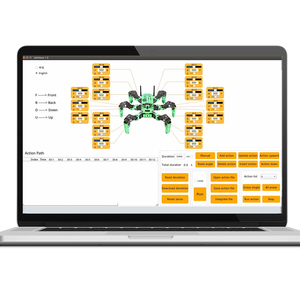
- User Interface: The user interface is the bridge between humans and the hexapod. It can be software-based, hardware-based, or both. Software interfaces often use a PC or mobile app. They provide visual representations of the robot's status and controls. Hardware interfaces may include buttons, joysticks, or touchscreens. They allow users to input commands directly. The interface can be local or remote. Local interfaces are on-site, while remote interfaces use the internet for control. The design focuses on making controls intuitive and responsive.
Wearing/Matching suggestions of robot hexapod kit
Robots are made in various forms, and one of their configurations is the hexapod. It has six legs and is thus capable of moving in any direction. This is due to the fact that the hexapod can move its legs independently. It can also adapt to rough surfaces due to its multiple legs. This makes it suitable for difficult terrains. Here are some suggestions for wearing and matching hexapod robot kits.
- Matching: When matching a hexapod robot kit with its components, consider the compatibility of servos and microcontrollers. Select high-quality servos that offer precise control. Pair them with a robust microcontroller like Arduino or Raspberry Pi. Ensure the power supply can support all components. This ensures reliable operation. Choose a sturdy chassis material. For example, aluminum or plastic. It can support the robot's weight and movement. Match wheels or legs to the robot's design. Prioritize components from reputable suppliers. This ensures quality and support.
- Wearing: Wearing a hexapod robot kit requires careful assembly. Start by securing the legs to the chassis. Use screws or pins provided in the kit. Ensure each leg is firmly attached. This allows for proper movement. Next, install the servos at the joints of each leg. These servos control the leg movements. Make sure they are aligned correctly. This ensures smooth operation. Then, connect the wires of the servos to the microcontroller. Follow the manual's instructions to avoid errors. Finally, test each leg individually before final assembly. This ensures the robot can walk properly.
- Combining: Combining a hexapod robot kit involves integrating its mechanical and electronic parts. Start by assembling the chassis and attaching the legs. Next, install the servos at the joints. Connect their wires to a microcontroller. This controls the robot's movements. Then, add sensors like cameras or Lidar for perception. Connect them to the microcontroller as well. Program the robot using Python or C++. Use libraries like ROS for managing its functions. Finally, test the robot in stages. First, check the movement, then its sensors. This ensures each part works before full integration.
Q&A
Q1: How many legs does a hexapod have?
A1: A hexapod has six legs. The name hexapod comes from the Greek words “hexa” which means six and “pous” which means feet. Unlike other robots that have wheels or tracks, a hexapod moves using its six legs, enabling it to traverse rough terrain.
Q2: How does a hexapod move?
A2: A hexapod moves by alternating the motion of its legs. It moves one or two legs at a time while the others remain on the ground, propelling itself forward in a coordinated manner. This method of locomotion allows it to maintain stability and navigate various terrains.
Q3: What are the hexapods' joints made of?
A3: The joints in a hexapod kit are typically made of servos. Some advanced models use motors with encoders for precise control. These joints provide flexibility and movement, allowing the six legs to move in different directions and at various angles.
Q4: What surfaces can a hexapod walk on?
A4: A hexapod can walk on various surfaces, including grass, mud, sand, and rocks. Its six legs and flexible joints give it stability and adaptability, making it suitable for rough and uneven terrains.
Q5: Is the hexapod remote-controlled?
A5: Yes, most hexapod robot kits are remote-controlled. They come with controllers or can be operated via smartphones and computers. Some advanced models can also be programmed for autonomous operation using pre-set algorithms and sensors.







 Ready to Ship
Ready to Ship