All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(86 products available)
























 Ready to Ship
Ready to Ship






















The nema 11 stepper motor encoder has several types that are distinguished by the kind of feedback they provide. These types include the following:
Absolute encoders
Absolute encoders provide a unique position for every shaft angle. They use a resolvable codex pattern, hence enabling the motor to retain its position during power loss. They give more sturdy output data from the motor. Nema 11 drives with absolute encoders are suitable for complex applications that require high precision and reliability, particularly in safety-critical environments.
Incremental encoders
The incremental encoders are powerhouses. They track the movements of the motor in terms of electrical pulses. These electrical pulses are generated when the motor shaft rotates. They are usually less expensive than absolute encoders. Incremental encoders are often applied to NEMA 11 stepper motors for typical applications requiring reasonable precision and cost-effectiveness. They can be used for relative positioning and are obtainable in one revolution forms.
Quadrature encoders
Incremental encoders can also be quadrature. There are two phase output signals that are out of phase. The difference in phase allows the determination of the direction of the rotation of the motor. In conjunction with proper signal processing circuitry, quadrature encoders can provide direction and resolution. These encoders are widely applied in NEMA 11 stepper motors for motion control applications demanding directionality and precision.
Optical encoders
Optical encoders utilize light beams and photographic sensors to measure the movements of the shaft. They are usually characterized by higher resolutions. They also deliver feedback with more precision. NEMA 11 motors employ optical encoders for applications where high accuracy is a requisite. They include robot arms, CNC machines, and 3D printers.
Magnetic encoders
Magnetic encoders are typical low-profile devices. They identify the position of the motor by using magnetic fields and magnet sensors. These encoders are typically more durable than their optical counterparts. NEMA 11 motors utilize magnetic encoders for outdoor industrial applications suited to weather and environmental elements.
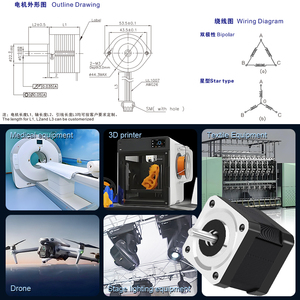
3D printers
These encoders are responsible for ensuring accurate extrusion and print head positioning. This is what leads to smooth operation and high-quality prints. Feedback provided by the encoder allows the motor to make precise movements of the steps and sub-steps for better detailed prints.
CNC machines
Nema 11 steppers are applied in light machining or desktop milling operations. Magnetic and optical encoders on these motors supply precise positioning and fine control of cutting tools. This degree of accuracy is crucial in CNC applications to attain high tolerance levels in fabricated components.
Robotics
These motors are often applied in robotic arms and joints. They assist in achieving precise control of movement. The encoders give feedback for position and speed control, which is essential for tasks requiring accuracy in manipulation, such as assembly, soldering, and picking-and-place operations.
Textile machinery
NEMA 11 motors are used to control various components like looms and knitting machines. These motors operate with encoders to provide accurate tension control and material feed. This control leads to the production of fabrics with consistent quality and patterns.
Medical equipment
Stepper motors play critical roles in medical devices like infusion pumps and robotic surgery tools. Due to their encoders, these motors ensure precise drug delivery rates or control of surgical instruments. This is crucial for patient safety and effective treatment performance.
Laser engraving and cutting
Laser cutters and engravers require precision in their movement. It guarantees proper cutting and engraving patterns. NEMA 11 stepper motors used in these devices have encoders that provide detailed feedback. This is how they ensure that the lasers follow exact design layouts to mandate high precision in projects.
Automation and control systems
These motors are widely used in industrial automation systems. Commonly found in control valves, feeders, and conveyor systems, all of which require precise control. NEMA 11 encoders help maintain accuracy in these operations, improving efficiency and reliability in various commercial settings.
Data on torque and speed
A great feature of the NEMA 11 stepper motor with an encoder is its great torque and rotational speed. An average motor produces approximately 0.3 Nm of holding torque and can rotate at around 300 RPM. These properties make the motors ideal for applications that require moderate power and speed.
Stepper motor with high precision
Of the 1.8 degrees typical step angle, each step equals Microstepping technology, which allows finer movements. Often, stepper motors with encoders provide additional position feedback. This is what allows high precision and accuracy in control, thus reducing losses in steps and improving overall performance.
Construction materials
NEMA 11 motors are generally constructed from durable materials that guarantee long-term reliability. They are made of aluminum housings that are compact and lightweight but also strong and dissipate heat efficiently. The internal components, like gears and pulleys, are mostly made from hardened steel or reinforced plastic. These ensure minimal wear and endure great stress during operations.
Shaft and bearings
To ensure smooth operations in different applications, NEMA 11 motors use stainless-steel shafts and quality ball bearings. This reduces friction and guarantees accuracy in motion control. In addition, the selected bearing type contributes to quiet operations and greatly enhances system stability.
Encapsulation and protection ratings
Most of these motors are IP-rated. This means they come with some form of protection against dust and water. Typical models have IP40 or IP50 ratings, which prevent particulate matter's entry into the motor housing. This ensures the motors are efficient in clean environments and industrial settings where dust and moisture are aspects of life.
Requirements for application
Find out what torque, speed, and precision are required for the application, as well as load and environmental factors. One should also consider the required step resolution for smooth and accurate motion.
Encoder type
Select an encoder that fits the feedback precision and accuracy needs of the application. Absolute encoders give position feedback for high-reliability tasks. Incremental encoders are adequate for general control applications.
Communication
Different encoders may communicate through various interfaces, such as analog signals or digital protocols. Ensure the motor driver and controller are compatible with the encoder interface.
Microstepping capability
Microstepping allows finer control of the motor. The microstepping level determines the smoothness of motion and resolution. Choose a motor with the necessary microstepping capability according to the application needs.
Environmental suitability
Analyze the work environment of the motor and encoder. Check if the motor can withstand temperature, humidity, and dust exposure. Also, check whether the encoder can be protected from similar environmental conditions that machined parts face.
Power ratings and compatibility
Make sure the motor's power ratings, such as voltage and current, are compatible with the driver and power supply used in the system. The encoder should also be compatible with the motor controller for better signal processing.
Maintenance
It's also important to consider a stepper motor with a low-maintenance encoder. Magnetic encoders are generally more robust and require less maintenance than optical encoders.
A1: A stepper motor with an encoder provides feedback on the motor's position and speed. This setup improves accuracy and performance in applications requiring precise control.
A2: Encoders enhance stepper motor performance by reducing lost steps and improving torque. They allow for closed-loop control, which leads to smoother operation and increased efficiency.
A3: Optical encoders use light to detect position and generally offer higher resolution. On the other hand, magnetic encoders use magnetic fields for position detection. They are more robust and tend to withstand harsh environments better than optical encoders.
A4: Encoders are not always necessary. Most applications do just fine without them, especially low-precision ones. However, high-precision applications benefit significantly from the encoders' feedback.
A5: Selection depends on the specific application requirements for precision, speed, and environmental conditions. Cost and complexity are also factors taken into account.